无人驾驶是如何实现的
无人驾驶的概念并不新鲜,其在航空领域早已有了成熟的应用,如我们乘坐的民航客机,在进入巡航阶段后,都是通过自动驾驶系统进行自动飞行的。
但是,相较于万米高空单一的飞行环境,汽车在陆地上的行驶环境,特别是在非封闭行驶环境的道路上要复杂得多,因此无人驾驶技术在汽车领域一直未得到大规模的应用。
近年来,随着传感器、人工智能、智能芯片、高性能计算等技术的快速发展,汽车领域的无人驾驶研究也逐渐兴起。
很多人将无人驾驶和自动驾驶混为一谈,从字面意思上来说两者含义的确很相近,但从技术层面来说,无人驾驶严格意义上是自动驾驶的最终目标。
国际自动机工程师学会(saeinternational)将自动驾驶分为6个等级:l0到l5。
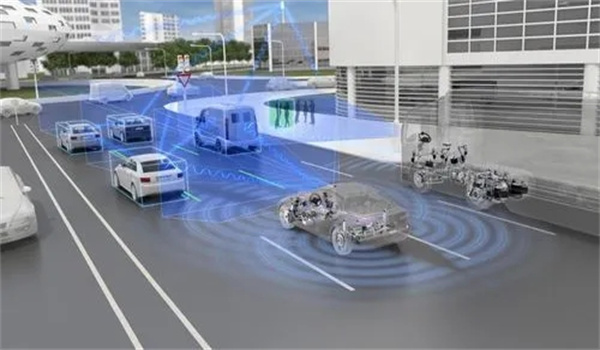
通常来说,无人驾驶是感知技术、智能计算、智能控制等相关技术的综合实现。感知技术,指的就是无人汽车上的各种传感器——摄像头、激光雷达、c-v2x等,用来实时收集汽车运行过程中复杂的路况信息。
智能计算,则是汽车上的计算单元通过对各个传感器收集到的路况数据进行融合并进行智能分析,从而对汽车的各个控制系统下达控制指令。
智能控制,则接受计算单元下达的命令,控制汽车的行进、转弯、变道和刹车等。就像我们开车要“眼观六路,耳听八方”一样,感知技术相当于无人驾驶的“眼睛”,时刻观察周围的情况。
智能计算则相当于“大脑”,需要根据观察到的情况快速地作出反应。智能控制则相当于“四肢”,根据“大脑”的指令来控制方向盘、油门和刹车,从而保证无人驾驶汽车沿着预定道路安全行驶。



